

農業コラム
- 農業施策
- 2019年02月13日
「大規模施設園芸の無人搬送体系の確立」
引用:「施設と園芸」No.184 特集 施設園芸の省力化・自動化技術
寄稿: 矢崎化工株式会社 関東支店 農林水産課 課長 今野求
1.はじめに
近年、各産業において労働力不足が叫ばれている。数年前から上昇傾向にある人手不足倒産(従業員の離職や採用難等により、収益が悪化したことを要因とする倒産)の件数は、前年同期比40.7%増となっている(帝国データバンク2018年10月9日発表)。この状況打開のため雇用条件、労働環境の見直しが必要不可欠となっている。
農業の現場においても栽培規模拡大に伴い、収穫、調整、選果など、多くの労働を必要とする経営環境になっているため、労働力の確保が課題となっている。
一方、農場運営において、人件費の削減は黒字経営のために必要不可欠である。そのために、作業工程の分析と栽培のシミュレーションが重要となる。作業工程の分析とシミュレーションにより適切な工数と人員配置を明確化して、人でなければできないことに人員を配置し、それ以外の部分は無人化、自働化することで、人件費の削減と作業の効率化を図ることができる。
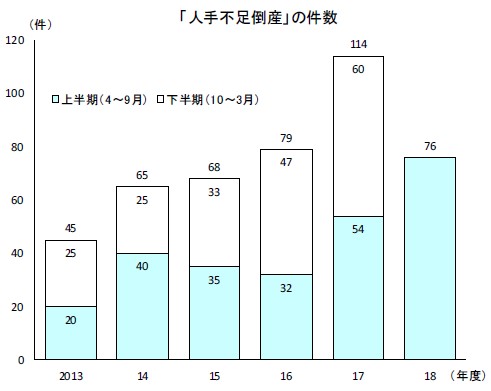
出典:株式会社帝国データバンク「人手不足倒産」の動向調査(2018年度上半期) 2018/10/9
ここでいう自働化とは、トヨタ生産方式における用語の意味である。人の作業を機械に置き換える自動化と異なり、人の働きを機械に置き換える“自働化”のことである。目的は二つあり、一つは省人化である。人を機械の番人にしないことで、工程から人員を削減する。二つ目は品質・設備・ラインの造り込みである。造り込みにより、問題点が“見える化”され、“自工程完結”の意識が強くなる。モノの移動は、ムダ・ムラ・ムリの発生しやすい工程である一方、無人化、自働化しやすい工程でもある。
本記事においては、日本の大規模施設園芸の現場における、モノの運搬や人員のオペレーションについての実態を紹介する。また、これからの施設運営技術の一つとして、無人搬送機の活用による自働化へのアプローチについて提案する。
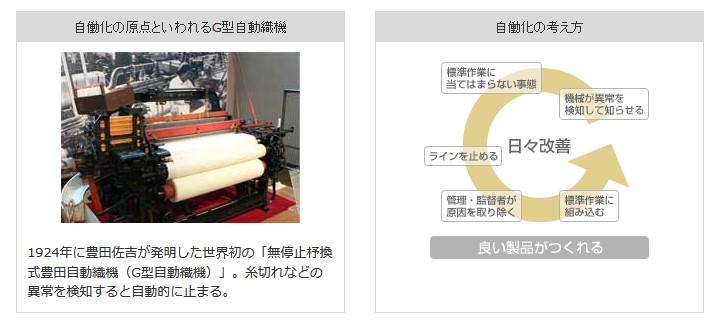
出典:TOYOTAホームページ(企業情報/企業理念/トヨタ生産方式の概念)「自働化について」
(https://www.toyota.co.jp/jpn/company/vision/production_system/jidoka.html)
「自働」とは、機械に善し悪しを判断させる装置をビルトインした機械であり、「自動」は動くだけのものです。機械を管理・監督する作業者の動きを「単なる動き」ではなく、ニンベンの付いた「働き」にすることが「自働化」を意味します。
「異常があれば機械が止まる」ことで、不良品は生産されず、ひとりで何台もの機械を運転できるので、生産性を飛躍的に向上させることができました。
2.施設園芸における運搬手段
1haを超える大型施設園芸の圃場や作業場において、収穫物や残渣、肥料などの重量物運搬にフォークリフトが多く用いられている。
多くの人、モノが行き交う現場において、フォークリフトの運用は多くの危険を生むことがある。また、運転するためには免許が必要となるため、人員配置についても考慮が必要になる。
フォークリフトの運用は、多くの場合、出荷場における荷下ろしや、荷積みの工程であるが、圃場内において収穫物や残渣の搬送に使われることもある。
フォークリフトは、正社員がその運転を担当することが多い。本来社員が担う管理工程の手を止めて運転に従事することとなるうえ、重大事故発生のリスクもある。フォークリフト運用中の事故やヒヤリハットは、施設への衝突や荷崩れをはじめ多く報告されている。また、人身事故にも繋がり得るヒヤリハットも報告されており、運用におけるリスク低減が健全な経営のために重要となっている。
出展:厚生労働省 職場のあんぜんサイト 労働災害事例イラスト
3.オランダの大規模施設園芸における運搬
写真はトマト栽培ベンチのイメージです。
オランダのトマト生産施設は、約1628haであり、内58%が6ha以上の施設である。それに対しての雇用者は5.4人/haであり、非常に少人数で運営されている。
少人数によるオペレーションを可能にしているのが、システム化と自働化、無人化技術である。
例えば、圃場から収穫物を運ぶ、選果場で積替えするといった、モノの移動のみを行う工程は、無人で行うことができるよう構築されている。無人搬送機は、収穫物が満載の運搬台車を選果エリアまで搬送する。選果エリアでは、自動移載機による積替え、空コンテナの供給が行われる。これにより圃場作業者は収穫作業、調整作業のみに集中することができる。選果場作業者もまた、与えられた作業のみを遂行できる。オランダのトマト相場は、日本に比べ3分の1程度と低い。そのため、栽培効率を最大化し、人件費を削減するための様々なシステムが導入されている。
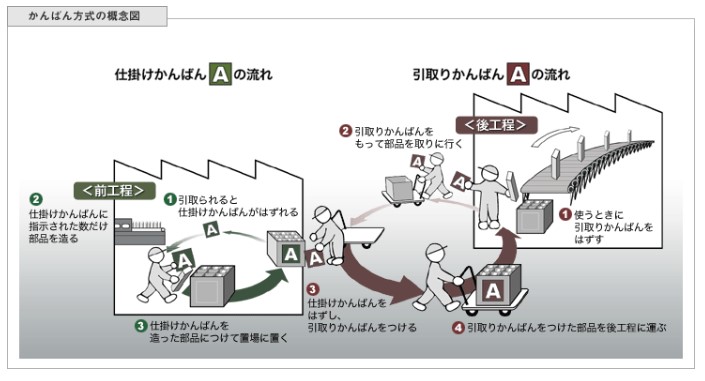
4.製造業における無人搬送車の活用
ジャストインタイム生産方式は、多くの部品や工程をもって、完成品を作っていく製造業の工場において多く採用されている。必要な物を、必要な時に、必要な量だけ製造することにより、工程間の仕掛在庫を最小限に抑えることができる。
過剰な在庫を持たないため、作業エリアは最小限の面積を準備すれば良い。また、すべての作業にかかる工数が計算されるため、人と時間と生産量を予測することができる。そのため、部品の供給や完成品の移動に無人搬送機を使用することで、人件費の削減をするとともに、生産量を管理することができる。
出典:TOYOTAホームページ(企業情報/企業理念/トヨタ生産方式の概念)「ジャスト・イン・タイムについて」
(https://www.toyota.co.jp/jpn/company/vision/production_system/just.html)
5.生産量の予測と7つのムダ
トヨタ生産方式において定義された付加価値を生まない「7つのムダ」は、表-1の通りである。施設園芸の圃場においては、どのような工程がムダと考えられるだろうか。
表-1 7つのムダの圃場への当てはめ
| ムダの種類 | 内 容 | 圃場運営において |
|---|---|---|
| ①つくりすぎのムダ | その時点で必要ないものを余分につくること | 出荷用段ボールの製函など |
| ②手持ちのムダ | 前工程からの部品や材料を持って仕事ができないこと | 圃場から運ばれてくるまでの、選果場の待ち時間 |
| ③運搬のムダ | モノの必要以上の移動、仮置き、積替えなどのこと | 収穫台車からパレット、パレットから作業台への移動、積替作業 |
| ④加工そのもののムダ | 従来からのやり方の継続といって、本当に必要かどうか検討せず、本来必要の無い工程や作業を行うこと | フォークで運ぶ、台車を人が運ぶなど人でなければ本当にできないのか |
| ⑤在庫のムダ | 完成品、部品、材料が倉庫など保管され、すぐに使用されていないこと | 圃場のパレットでの収穫コンテナの滞留 |
| ⑥動作のムダ | 探す、しゃがむ、持ち替える、調べるなど不必要な動きのこと | コンテナを持ち上げる、積替える、運ぶなど |
| ⑦不良をつくるムダ | 不良品を廃棄、手直し、作り直しすること | 人が介在することによるミスで発生する事故など |
まず,ムダを考える前に、圃場における生産量と労働の予測が必要である。どれだけの量をどのくらの時間で処理しなければならないかを明確にすることで、必要な人、備品、消耗品が見えてくる。
システム化された栽培方式においては、季節ごとのおおよその収穫量を予測することはできる。その中で、最も収穫量が多くなる時期のデータから予測を立てる。
上記のような計算ができると、1日の作業内で必要となる道具の準備ができる。繁忙期の作業人数に合わせて台車の数量が決定する。1日の収穫量から組立てる出荷箱数が算出できるため、前日の工程として組み込むことができる。これにより、台車や箱類の置き場として必要な面積が推測できるため、施設設計の段階から、定位置、定量管理の準備をすることができるようになる。
上記のようなシミュレーションにより、多くのムダを回避することができる。しかし、「運搬のムダ」については、さらなる改善が可能だと考えられる。
6.無人搬送体系の確立
大型施設園芸の圃場において、収穫したコンテナをパレットに仮置きし、フォークリフトで運搬し、選果ラインに流すために積み替えるといった工程を目にすることがある。一定量パレットに溜まるまで、選果場に搬送されないため、選果場における手待ちの発生や圃場に置かれることによる品質低下のリスクがある。運転手が別の仕事に掛からなければならないなどの状況によっては、一定時間、運搬自体ができないことも発生し得る。
こうした問題を解決するのが無人搬送体系の確立である。無人搬送体系は搬送を特定の人員の作業とすることなく、圃場の収穫量と選果場の処理能力をリンクさせることを可能にする。
前項において挙げたシミュレーションは無人搬送体系の確立に必要なものである(図-1)。選果機の性能から算出した必要供給量に合わせて、圃場から収穫物が小ロットで搬入されてくるようにシステムを構築することで、圃場、選果場の双方におけるモノの滞留を減らすことができる。
特に気温が上昇する時期においては、収穫後のコンテナを圃場通路に滞留しておくことで品質の低下に繋がるため、収穫されたコンテナは迅速に移動すべきである。
また、リスク管理の観点からもメリットがある。無人搬送機の搬送のみとなれば、圃場と選果場との開口部は最小限となるため、開口部からの病害虫侵入を最小限に抑えることができる。加えて、圃場内、選果場内をフォークリフトが走行することが無くなるため、事故発生リスクを減少させることができる。
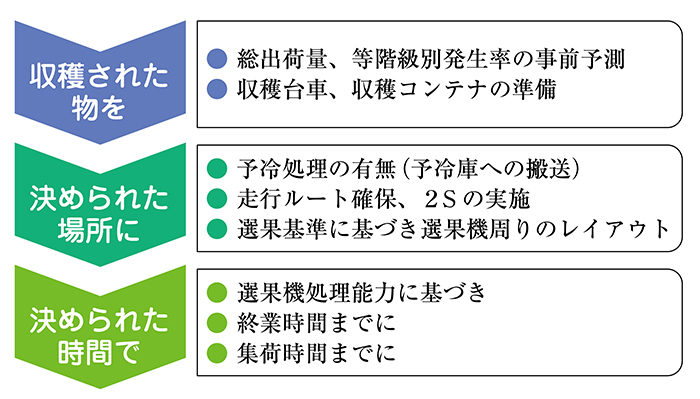
図-1 無人搬送体系確立のプロセス
7.コンベアレス化によるスリム化
圃場の生産規模によっては、コンベアが組み込まれた大きな選果機を必要としないこともある。そのような圃場においては、より小さなコストで選果場を運用できる可能性がある。
大玉トマトにおいて、大規模な選果を必要とする場合、図-2のように搬送台車から荷受けコンベアに移載し、段バラシの工程を経て、選果機投入口へ運ばれていく。最大生産量に合わせて構築されたコンベアラインは、非常に大きく、選果場の面積を大きく取らなければいけない要因となる。
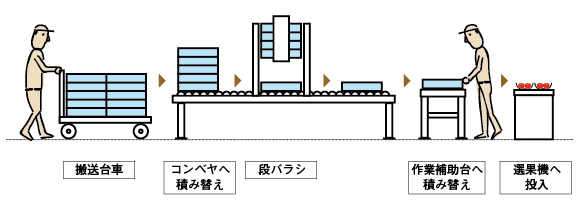
図-2 大型圃場における選果場イメージ
無人搬送機の利用体系においては、収穫台車のみを圃場から持ってくる形になる。決まったサイズの収穫台車が選果場に運ばれてくるのであれば、そのもの自体を作業者の手元に供給することができると考えられる。そこに図-3に示すような簡易的な昇降装置を置くことで、作業者はコンテナの持ち上げをすることなく、選果機への供給作業のみに従事できるようになる。コンベアを排除することで、全体的なコストを削減できる。また、作業場内の据え置き機材を減らすことができるため、時期の生産量に適したレイアウトへの変更が容易にできるようになると考えられる。
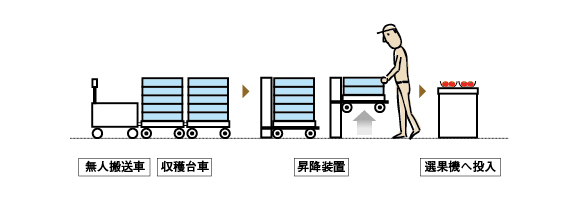
図-3 コンベヤレス化した選果場イメージ
8.無人搬送車「AGV」Automated Guided Vehicleの活用

図-4 無人搬送車「AGV」
ここまで施設園芸における搬送作業の課題と無人搬送体系確率の必要性を述べてきた。当社がこうした課題の解決を目指して活用したのが、大規模施設園芸における搬送ラインの自動化を可能とする無人搬送車「AGV」である。図-4はAGV牽引及び移載システムの簡易イメージである。無人で搬送し、移載場所でもセンサー感知により自動でコンテナを移載する。
AGVは磁気誘導により定められたコースを一定速度で走行する。搬送の手段は荷物を本体に積載するタイプと、荷物を積載した台車を複数台牽引するタイプがある。
AGVは無人で物を運搬できるが、それ自体が作業改善,人件費削減を目的とするものではなく、前後行程との同期を目的とする。そのためには、圃場から搬送する量と選果機の処理能力をシミュレーションし、荷物を滞留させないシステムと人員配置を体系化することが重要である。当社では、荷物に合わせたAGVユニットの選定から、運搬台車形状と運搬方式の決定、荷物の移載、昇降、段積み・段バラシ装置等でシステムを構築し、最適な無人搬送体系の確立ができると考えています。
9.おわりに
大規模施設園芸圃場の労務管理において、人、モノの適切な配置と物流システムを構築するために、栽培、選果、出荷までの工程の分析と同期が重要である。
各工程のシミュレーションをすることで、作業内容を分割して捉えることができる。人でなければできないこと、人でなくてもできることを明確にすることで、労働環境の改善を検討することができるようになる。
改善のためのツールには、無人搬送機やAI、クラウドを利用した管理システムなど様々な可能性がある。労働力の確保が困難になると思われるこれからの大規模施設園芸の経営のために、労務管理を細分化・単純化し、労働環境を改善することが重要となってくる。
- 農業への想い
- 農業への想い・アグリコネクターとは
- 選ばれる理由
- 提案力×製品力
- アフターフォロー
- お客様の声
- 展示車・研修会
- 製品情報
- 製品一覧から探す
- デジタルカタログ
- 導入事例
- 導入事例一覧から探す
- イレクターで省力化
- イレクターとは
- イレクターで農作業の改善
- はじめての方へ
- 購入の流れ
- よくあるご質問
![]()
関連サイト





Copyright © 2001 Yazaki Kako Corporation. all Rights Reserved.
